

全国服务热线:

新闻中心
NEWS
联系我们 /contact us




伺服电机位置比较的动作过程是怎么样的?
伺服电机位置比较的动作过程是怎么样的?
松下伺服电机编码器的实际位置经过位置比较值(Pr4.48~4.55)时,输出位置比较输出脉冲,其宽度为Pr4.44所设定的脉冲时间宽度。
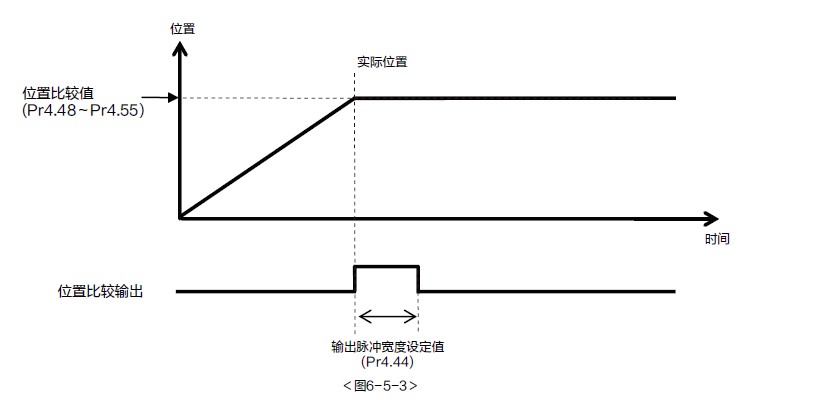
•不管编码器位置从哪个方向经过比较值后,都会输出位置大小关系变化后的脉冲。
•在1个位置比较输出可以设定多个位置比较值。
•在动作方向反转时,或者已设定多个位置比较值等情况下,脉冲输出中,编码器的位置或者外部位移传感器经过位置比较值的情况下,从最后经过的点到脉冲宽度设定值之间,持续脉冲输出ON的状态。

•在与位置比较值相同的位置停止的情况下也与通过时一样,仅输出1次脉冲。(图6-5-3)
•通用输出(SO1~SO6)作为位置比较输出使用时,Pr4.10~4.15请分配对应全部控制模式下的位置比较输出(CMP-OUT)。
•位置比较输出功能,以前次伺服电机的速度作为基准,自动补充编码器串行通信等的延迟时间的误差后输出。另外,可以根据Pr4.56(位置比较输出延迟补偿补偿量)的设定,调节补偿量。
•把通用输出(SO1~SO6)分配为位置出(CMP-OUT)时,不能通过PANATERM, MODBUS通信监测位置比较输出。
伺服电机可使控制速度,位置精度非常准确,可以将电压信号转化为转速和转矩以驱动控制对象。伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高、始动电压等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。
通常根据伺服驱动机的种类来分类,有电气式、油压式或电气—油压式三种。
伺服系统若按功能来分,则有计量伺服和功率伺服系统;模拟伺服和功率伺服系统;位置伺服和加速度伺服系统等。
电气式伺服系统根据电气信号可分为DC直流伺服系统和AC二大类。AC交流伺服系统又有异步电机伺服系统和伺服系统两种。

页面版权所有 - 上海会通自动化科技发展有限公司 | Copyright ©2019 All Rights Reserved. 《中华人民共和国电信与信息服务业务经营许可证》 中企动力 昆山 沪ICP备10216829号