

全国服务热线:

新闻中心
NEWS
联系我们 /contact us




伺服电机—松下伺服电机速度控制模式试运转
伺服电机—松下伺服电机速度控制模式试运转
松下伺服速度控制模式试运转步骤如下:
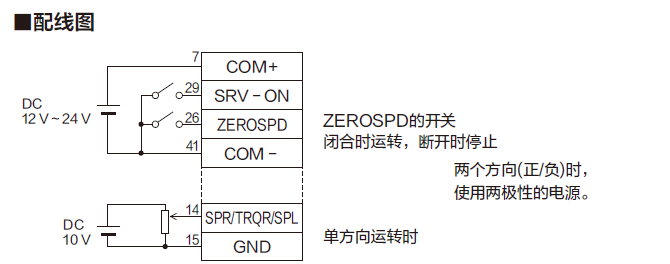
连接控制器插头X4。
在控制用信号(com+,com-)输入电源(DC12~DC24V)
接通驱动器电源。
取人参数标准设定值。
连接伺服使能开启输入(SRV-ON 连接器X4 29 PIN)和COM-(连接器X4 41PIN)呈伺服使能开启状态,将伺服电机置于励磁状态。
闭环零速篏位输入ZEROSPD,将速度指令输入SPR(连接器X4 14PIN)和GND(连接器X4 15PIN)之间的电流电压从0V逐渐提高,确认电机旋转状态。
在监视模式下确认伺服电机旋转速度。
•旋转速度是否和设定一样。
•指令为0时,电机是否停止。
指令电压为0V时,电机微速度旋转状态下,补偿指令电压。
变更旋转速度、旋转方向时,需再次设定以下参数。
•PR3.00: 速度设定内外切换
•PR3.01:速度指令方向指定选择
•PR3.03: 速度指令输入反转
- 未能顺利旋转时,请参照P2-98准备篇(不旋转原因的显示)
|
PRNO. |
参数的名称 |
设定值 |
|
0.01 |
控制模式设定 |
1 |
|
5.04 |
驱动禁止输入设定 |
1 |
|
3.15 |
零速度位功能选择 |
1 |
|
3.00 |
速度设定内外切换 |
必要时,请设定 |
|
3.01 |
速度指令方向指定选择 |
|
|
3.02 |
速度指令输入增益 |
|
|
3.03 |
速度指令输入反转 |
|
|
4.22 |
模拟输入1(A11)零漂 |
|
|
4.23 |
模拟输入1(A11)滤波器设定 |
输入信号状态
|
NO |
输入信号名称 |
监视器显示 |
|
0 |
伺服使能开启 |
+A |
|
5 |
零速度嵌位 |
— |
伺服电机可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高、始动电压等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。
通常根据伺服驱动机的种类来分类,有电气式、油压式或电气—油压式三种。
伺服系统若按功能来分,则有计量伺服和功率伺服系统;模拟伺服和功率伺服系统;位置伺服和加速度伺服系统等。
电气式伺服系统根据电气信号可分为DC直流伺服系统和AC交流伺服系统二大类。AC交流伺服系统又有异步电机伺服系统和同步电机伺服系统两种。

页面版权所有 - 上海会通自动化科技发展有限公司 | Copyright ©2019 All Rights Reserved. 《中华人民共和国电信与信息服务业务经营许可证》 中企动力 昆山 沪ICP备10216829号