

全国服务热线:

新闻中心
NEWS
联系我们 /contact us




伺服电机-松下伺服全闭环控制模式
伺服电机-松下伺服全闭环控制模式
2020-08-20 09:50
伺服电机-松下伺服A6系列全闭环控制,就是使用外置的外部位移传感器直接检测出控制对象的位置进行反馈并进行位置控制,这样可以使控制不受丝杆的误差以及温度引起的位置变化的影响。
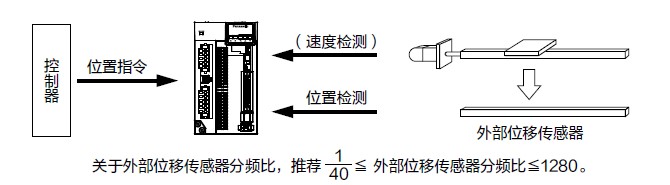
外部位移传感器相关参数设置方法:
- 确认伺服系统配线后通电。
- 确认前面板的反馈脉冲总和和外部位移传感器反馈脉冲总和的初始值。
- 使工件动作,确认在2)步骤已确认的初始值的移动量。
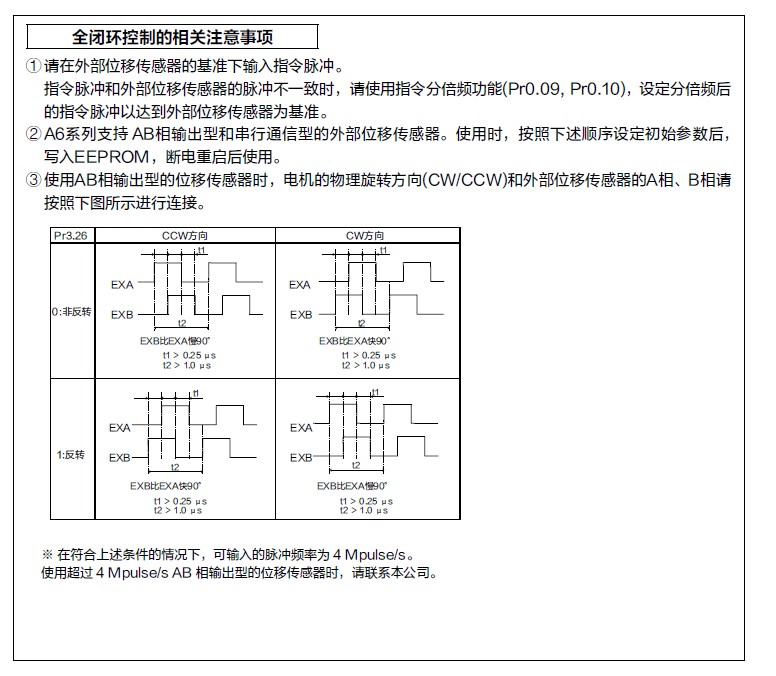
- 反馈脉冲总和和外部位移传感器反馈脉冲总和的移动量正负相反时,将外部位移传感器方向反转(PR3.26)设定为1。
- 外部位移传感器分倍频(PR3.24,3.25)根据设计商的值进行设定。
外部位移传感器分频比=
=
此比值一旦出现错误,编码器反馈脉冲算出的位置和外部位移传感器脉冲算出的位置偏差增大,特别是长距离动作时,会发生混合偏差过大异常保护。
- 为了防止机械破损,按照指令单位,将混合偏差过大(PR3.28)设定为适当的值。
伺服驱动器A6系列的编码器位置和外部位移传感器位置的差值,作为混合偏差在驱动器内部计算。如果出现外部位移传感器故障,或者伺服电机和负责的连接部位脱落等情况,为了避免机器暴走,破损,请将PR3.28(混合偏差过大设定)PR3.29(混合偏差清除设定)设定为适当的值。
如果过度扩大混合偏差过大范围,混合偏差过大检出延迟从而无法实现异常检出。另外,如果过度缩小混合偏差过大范围,可能会检出正常动作时伺服电机和机器间的扭曲量异常。
若外面位移传感器的分频比错误 ,即使外部位移传感器和电机位置一致的情况下,特别时在长距离动作时,会发生混合偏差过大异常保护(ERR25.0)
这种情况下,请尽可能的接近外部位移传感器的分频比,放宽混合偏差过大范围。
上一个 :
松下激光位移传感器的工作原理和用途
下一个 :
Bitpass电子变压器和线圈的有什么不同之处?

页面版权所有 - 上海会通自动化科技发展有限公司 | Copyright ©2019 All Rights Reserved. 《中华人民共和国电信与信息服务业务经营许可证》 中企动力 昆山 沪ICP备10216829号