

全国服务热线:

新闻中心
NEWS
联系我们 /contact us




伺服电机—松下伺服摩擦转矩补偿使用方法
伺服电机—松下伺服摩擦转矩补偿使用方法
使用方法如下:
摩擦转矩补偿根据所输入位置指令方向,如下图所示进行加算:
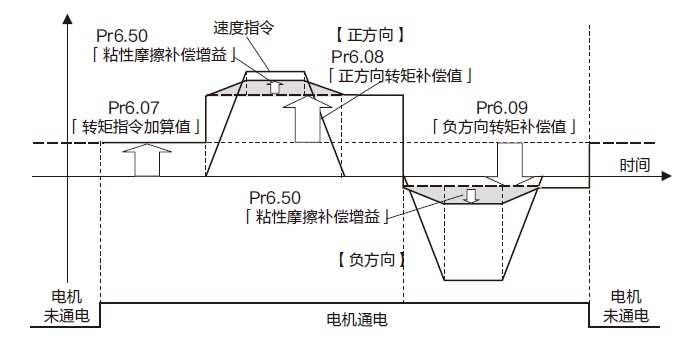
用通常固定加算的转矩指令加算值设定的偏载重补偿值何根据最后输入的指令速度方向加算,正方向转矩补偿值和负方向转矩补偿值设定的动摩擦补偿值和依从指令速度加算的粘性摩擦补偿值的合计为摩擦补偿转矩。
指令速度方向是在电源接通时以及伺服电机未通电状态下复位。
•PR6.07(转矩指令加算值)时根据垂直轴的重力等,在伺服电机增加一定的偏载重转矩时,设定此转矩指令值,根据移动方向降低定位动作的偏差。
•PR6.08(正方向转矩补偿值)以及PR6.09(负方向转矩补偿值)是由于皮带驱动轴等需要径向力的大动摩擦力转矩的负载,设定各参数的旋转方向的各个摩擦转矩,通过动摩擦降低定位整定时间的恶化以及偏差。
•PR6.50(粘性摩擦补偿增益)是通过设定对于粘性负载转矩指令值减小加速时的响应延迟,来自此性质的补正量是与速度指令值成正比值。
注意:偏载重补偿和动摩擦补偿可组合使用,也可分开使用,请注意根据控制模式使用限制。
转矩控制时:与参数设定无关,偏载重补偿以及动摩擦补偿需为0。
速度控制时,伺服使能关闭时:偏载重补偿根据PR6.07生效,动摩擦补偿设定需为0.
位置控制以及全闭环控制下伺服开启时:保持偏载重补偿以及动摩擦补偿值,直至输入最初的位置指令。从无位置指令到有位置指令变化时,偏载重补偿根据PR6.07更新。另外为了对应指令方向,根据PR6.08或者PR6.09更新动摩擦补偿值。

上海会通自动化科技发展有限公司为上市公司(新时达电气)的全资企业,始创于1993年,在全国主要省会城市及经济发达地区设有20多个分公司、办事处,年销售收入20多亿元人民币。
公司主营:松下伺服电机、松下传感器、松下PLC、日本SHIMPO减速机、德国NEGART减速机、RV减速机、APEX减速机、三木联轴器、DD马达等世界知名产品的营销与服务(运动控制领域系统集成商)。

页面版权所有 - 上海会通自动化科技发展有限公司 | Copyright ©2019 All Rights Reserved. 《中华人民共和国电信与信息服务业务经营许可证》 中企动力 昆山 沪ICP备10216829号