

全国服务热线:

新闻中心
NEWS
联系我们 /contact us




RV减速器OR谐波减速器的原理和优劣势
RV减速器OR谐波减速器的原理和优劣势
作为工业机械手关键零配件的高精密减速器,与通用性减速器对比,智能机器人用减速器规定具备传动齿轮短、重量轻、输出功率大、品质轻和易于控制等特性。
很多运用在骨节型智能机器人上的减速器关键有两大类:RV减速器和谐波减速器。
1、基本原理
用以转距大的智能机器人脚部腹部和手肘3个骨节,负荷大的工业机械手,一二三轴全是用RV。对比谐波减速机,RV减速机的关键所在制作工艺和机械加工工艺。RV减速机具备更高的疲劳极限、弯曲刚度和使用寿命,不像谐波传动系统那般随之应用時间提高,健身运动精密度会明显减少,其缺陷是净重重,尺寸很大。

用以负荷小的工业机械手或大中型智能机器人尾端好多个轴,谐波减速器是谐波齿轮传动的这种,谐波齿轮传动包含谐波网络加速器和谐波减速器。谐波减速器包括:刚轮、柔轮、滚动轴承和波超声波发生器三个,四者必不可少。在其中,刚轮的齿数略大于柔轮的齿数。谐波减速机用以中小型智能机器人特性是重量轻、很轻、承载力大、健身运动高精度,单级减速比大。
二者全是少齿差齿合,不一样的是谐波里的这种重要传动齿轮是软性的,它必须不断的高速形变,因此它较为敏感,承载能力和使用寿命都不足。RV一般是用摆线针减速机,谐波之前全是用渐开线齿轮齿形,如今有一部分生产厂家应用了双弧形齿型,这类齿型比渐开线齿轮优秀许多。
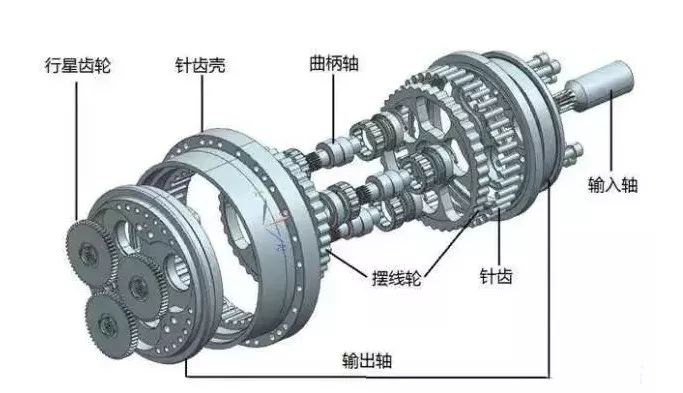
谐波减速器由“柔轮、波超声波发生器、刚轮、滚动轴承”这4个基础构件组成。
RV减速器较智能机器人中常见的谐波传动系统具备高得多的疲劳极限、弯曲刚度和使用寿命,并且回差精密度平稳,不像谐波传动系统那般随之应用時间提高健身运动精密度就会明显减少。因此很多國家的高精智能机器人传动系统多选用RV减速器,因而,RV减速器在优秀智能机器人传动系统中有慢慢替代谐波减速器的发展趋向。

这种商品在一些型号规格上的确存有取代关联,但这几种减速器只有保持一部分取代。绝大多数状况下,各种减速器没办法保持替换成,例如在传动比层面,谐波和RV的传动比必须远远地超过大行星,因此小传动比行业是大行星的天地。或许大行星的传动比是能够做大的,可是没办法去替换成谐波和RV。

页面版权所有 - 上海会通自动化科技发展有限公司 | Copyright ©2019 All Rights Reserved. 《中华人民共和国电信与信息服务业务经营许可证》 中企动力 昆山 沪ICP备10216829号