

全国服务热线:

新闻中心
NEWS
联系我们 /contact us




伺服电机怎么选择脉冲、模拟量、通讯三种控制方式?
伺服电机怎么选择脉冲、模拟量、通讯三种控制方式?
伺服电机控制方式有脉冲、模拟量和通讯这三种,在不同的应用场景下,我们该如何选择伺服电机的控制方式呢?
一、伺服电机脉冲控制方式
在一些小型单机设备,选用脉冲控制实现电机的定位,应该是最常见的应用方式,这种控制方式简单,易于理解。
基本的控制思路:脉冲总量确定电机位移,脉冲频率确定电机速度。选用了脉冲来实现伺服电机的控制,翻开伺服电机的使用手册,一般会有如下这样的表格:
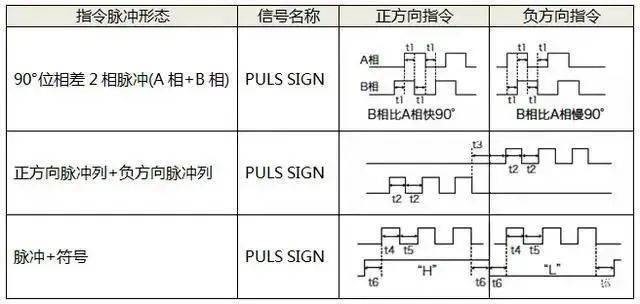
都是脉冲控制,但是实现方式并不一样:
第一种,驱动器接收两路(A、B路)高速脉冲,通过两路脉冲的相位差,确定电机的旋转方向。如上图中,如果B相比A相快90度,为正转;那么B相比A相慢90度,则为反转。
运行时,这种控制的两相脉冲为交替状,因此我们也叫这样的控制方式为差分控制。具有差分的特点,那也说明了这种控制方式,控制脉冲具有更高的抗干扰能力,在一些干扰较强的应用场景,优先选用这种方式。但是这种方式一个电机轴需要占用两路高速脉冲端口,对高速脉冲口紧张的情况,比较不适用。
第二种,驱动器依然接收两路高速脉冲,但是两路高速脉冲并不同时存在,一路脉冲处于输出状态时,另一路必须处于无效状态。选用这种控制方式时,一定要确保在同一时刻只有一路脉冲的输出。两路脉冲,一路输出为正方向运行,另一路为负方向运行。和上面的情况一样,这种方式也是一个电机轴需要占用两路高速脉冲端口。
第三种,只需要给驱动器一路脉冲信号,电机正反向运行由一路方向IO信号确定。这种控制方式控制更加简单,高速脉冲口资源占用也最少。在一般的小型系统中,可以优先选用这种方式。
二、伺服电机模拟量控制方式
在需要使用伺服电机实现速度控制的应用场景,我们可以选用模拟量来实现电机的速度控制,模拟量的值决定了电机的运行速度。
模拟量有两种方式可以选择,电流或电压。
电压方式:只需要在控制信号端加入一定大小的电压即可,在有些场景甚至使用一个电位器即可实现控制,非常的简单。但选用电压作为控制信号,在环境复杂的场景下,电压容易被干扰,造成控制不稳定。
电流方式:需要对应的电流输出模块,但电流信号抗干扰能力强,可以使用在复杂的场景。
三、伺服电机通信控制方式
采用通信方式实现伺服电机控制的常见方式有CAN、EtherCAT、Modbus、Profibus。使用通信方式来对电机进行控制,是目前一些复杂、大系统应用场景首选的控制方式。在这种方式下,系统的大小、电机轴的多少都易于裁剪,没有复杂的控制接线。搭建的系统具有极高的灵活性。
四、拓展部分
1、伺服电机转矩控制
转矩控制方式是通过外部模拟量的输入或直接的地址的赋值来设定电机轴对外的输出转矩的大小,具体表现为例如10V对应5Nm的话,当外部模拟量设定为5V时电机轴输出为2.5Nm。如果电机轴负载低于2.5Nm时电机正转,外部负载等于2.5Nm时电机不转,大于2.5Nm时电机反转(通常在有重力负载情况下产生)。可以通过即时的改变模拟量的设定来改变设定的力矩大小,也可通过通讯方式改变对应的地址的数值来实现。
主要应用在对材质受力有严格要求的缠绕和放卷装置中,例如绕线装置或拉光纤设备,转矩的设定要根据缠绕的半径的变化随时更改以确保材质的受力不会随着缠绕半径的变化而改变。
2、伺服电机位置控制:
位置控制模式一般是通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度,也有些伺服可以通过通讯方式直接对速度和位移进行赋值。由于位置模式可以对速度和位置都有很严格的控制,所以一般应用于定位装置,数控机床、印刷机械等等。
3 、伺服电机速度模式:
通过模拟量或脉冲频率的输入都可以进行转动速度的控制,在有上位控制装置的外环PID控制时速度模式也可以进行定位,但必须把电机的位置信号或直接负载的位置信号给上位机反馈以做运算用。位置模式也支持直接负载外环检测位置信号,此时的电机轴端的编码器只检测电机转速,位置信号就由直接的最终负载端的检测装置来提供了,这样的优点在于可以减少中间传动过程中的误差,增加了整个系统的定位精度。
4、谈谈3环
伺服一般为三个环控制,所谓三环就是3个闭环负反馈PID调节系统。最内的PID环就是电流环,此环完全在伺服驱动器内部进行,通过霍尔装置检测驱动器给电机的各相的输出电流,负反馈给电流的设定进行PID调节,从而达到输出电流尽量接近等于设定电流,电流环就是控制电机转矩的,所以在转矩模式下驱动器的运算最小,动态响应最快。
第2环是速度环,通过检测的电机编码器的信号来进行负反馈PID调节,它的环内PID输出直接就是电流环的设定,所以速度环控制时就包含了速度环和电流环,换句话说任何模式都必须使用电流环,电流环是控制的根本,在速度和位置控制的同时系统实际也在进行电流(转矩)的控制以达到对速度和位置的相应控制。
第3环是位置环,它是最外环,可以在驱动器和电机编码器间构建也可以在外部控制器和电机编码器或最终负载间构建要根据实际情况来定。由于位置控制环内部输出就是速度环的设定,位置控制模式下系统进行了所有3个环的运算,此时的系统运算量最大,动态响应速度也最慢。
免责声明:本文系网络转载,版权归原作者所有。本文内容为原作者观点,并不代表本公众号赞同其观点和对其真实性负责。

页面版权所有 - 上海会通自动化科技发展有限公司 | Copyright ©2019 All Rights Reserved. 《中华人民共和国电信与信息服务业务经营许可证》 中企动力 昆山 沪ICP备10216829号